Robotic Bending and Welding



Critic: Wes McGee | Fall 2013
Collaborators: Andrew Pries and Zac Potts
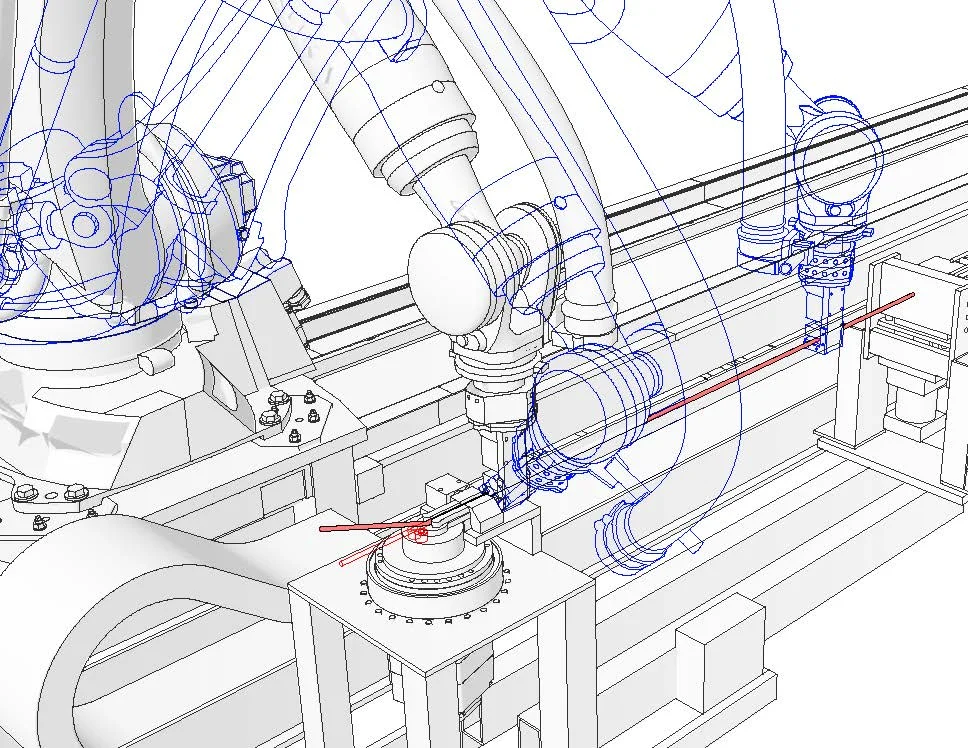
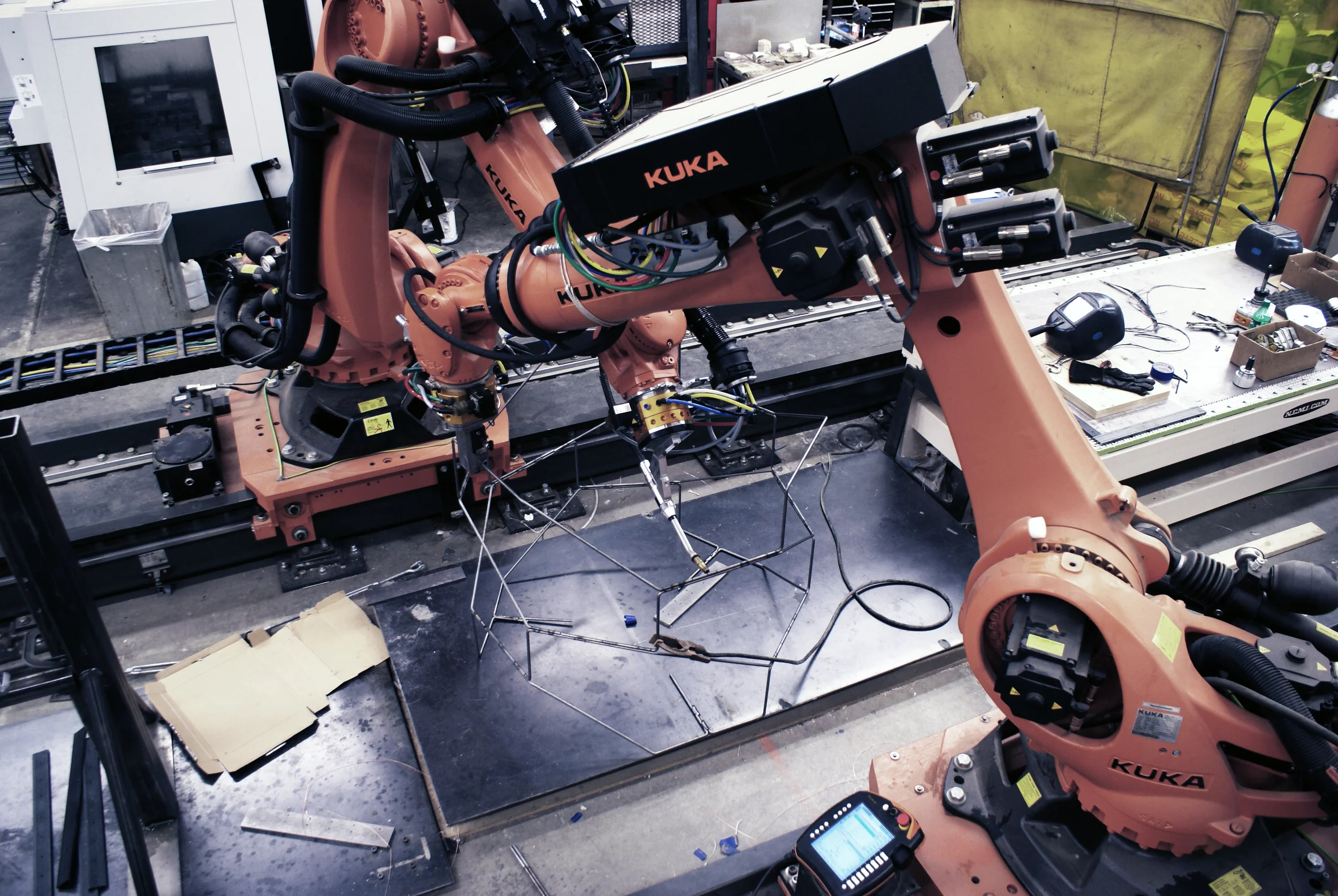
The premise of this project was to robotically bend, place, and weld 3/8’’ cold rolled steel rod. Over the course of the semester, we investigated the spring back deviation and determined an accurate regression model. Our final goal was to produce a spatial, parametric construct demonstrating our findings. The global form was determined by the limitations of the two Kuka robots and wire bender, and was composed of three identical components arrayed around a central point for accuracy of assembly. Further research will be conducted in an independent study in the Winter of 2014.